La inteligencia artificial suele imaginarse como algo que vive lejos: en servidores, en la nube, en modelos enormes que contestan desde una caja de texto.
Pero la robótica está empujando otra idea, más rara y más física: una IA que no sólo calcula, sino que aprende con el cuerpo.
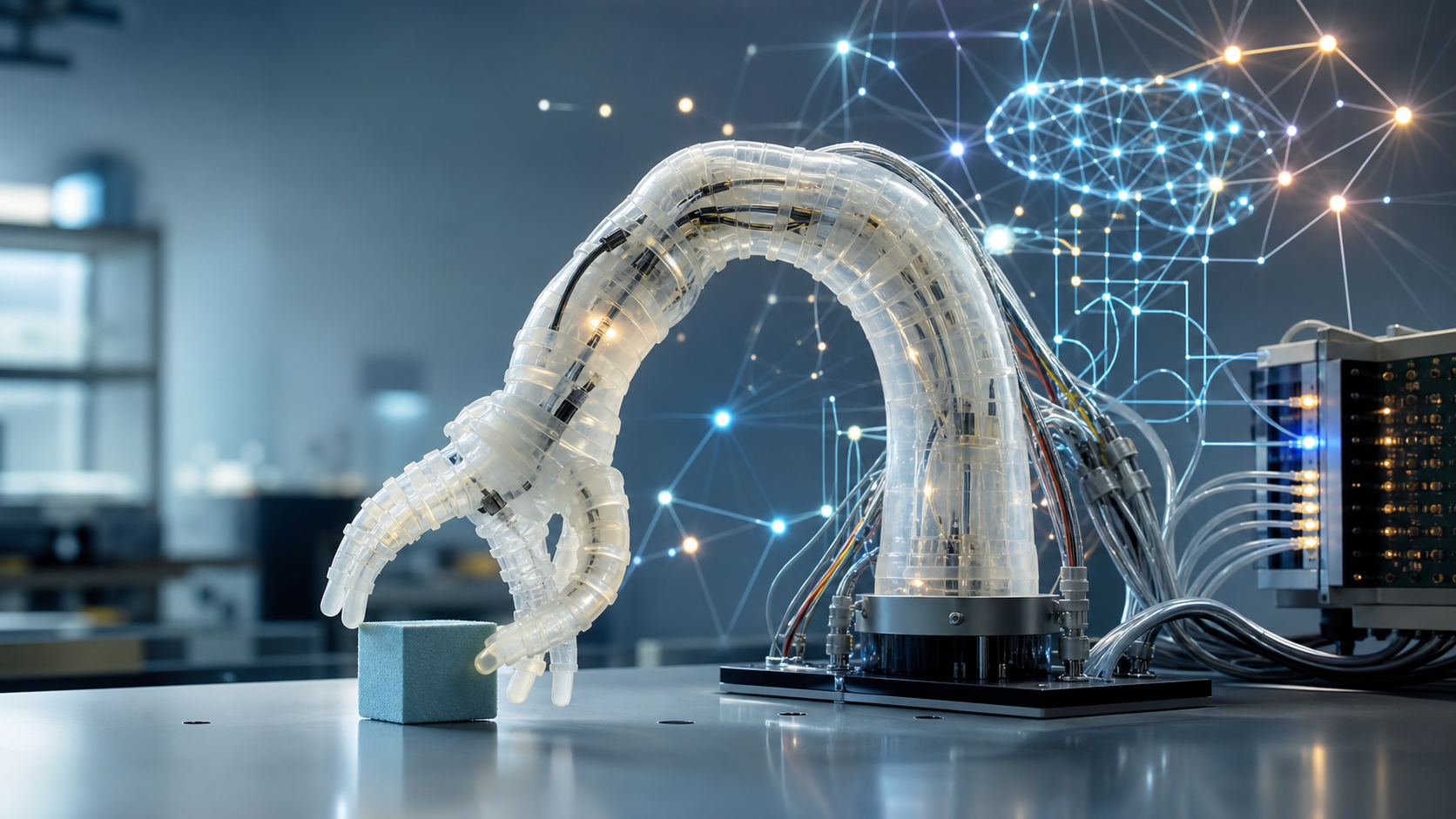
El ejemplo viene de los robots blandos. No son brazos industriales de metal ni humanoides rígidos caminando frente a una cámara. Son máquinas flexibles, hechas con materiales elásticos, actuadores, aire, cables o estructuras deformables. Pueden doblarse, apretarse, envolver objetos y moverse de formas que un robot tradicional no puede.
El problema es que justamente por eso son difíciles de controlar.
Un robot rígido tiene articulaciones más previsibles. Un robot blando cambia de forma todo el tiempo. Si toca un objeto, si carga peso, si recibe viento, si un actuador falla, su cuerpo deja de responder como en el laboratorio.
Ahí aparece el nuevo enfoque: copiar no sólo la idea de “cerebro”, sino algo más fino del cerebro humano: sinapsis que combinan memoria estable y adaptación inmediata.
El problema de los robots blandos
Los robots blandos prometen mucho porque se parecen menos a una máquina dura y más a un organismo flexible.
Eso los vuelve atractivos para tareas donde la rigidez es un problema:
- manipular objetos frágiles;
- asistir en medicina;
- operar cerca de personas;
- explorar espacios irregulares;
- adaptarse a superficies que cambian;
- sobrevivir a golpes, deformaciones o fallas parciales.
Pero esa flexibilidad tiene un costo. Cada movimiento altera el cuerpo. Cada deformación cambia la relación entre orden y resultado. Lo que funcionó en una situación puede fallar en otra.
Controlar un robot blando no es como mover una bisagra. Es más parecido a dirigir una mano hecha de goma, aire y cables, sabiendo que su forma nunca es exactamente la misma dos veces.
Dos tipos de sinapsis
Investigadores del MIT presentaron un sistema inspirado en una idea del cerebro: no todas las conexiones tienen que cambiar al mismo ritmo.
En el cerebro, algunas sinapsis sostienen aprendizajes más estables. Otras son más plásticas y se ajustan con la experiencia reciente. Esa mezcla permite conservar habilidades, pero también adaptarse cuando el mundo cambia.
El trabajo trasladó esa intuición a robots blandos con una arquitectura de dos capas:
- sinapsis estructurales, entrenadas previamente para aprender el comportamiento general del robot;
- sinapsis plásticas, capaces de ajustarse durante la operación para corregir cambios, perturbaciones o fallas.
La clave está en no tener que reentrenar todo desde cero cada vez que el cuerpo encuentra una situación nueva.
El sistema aprende una base, pero deja una parte preparada para modificarse en tiempo real.
La IA deja de ser sólo predicción
Esto importa porque cambia la imagen habitual de la IA.
En muchos sistemas actuales, la inteligencia parece vivir en el modelo. El mundo entra como datos, el modelo calcula y devuelve una respuesta.
En robótica blanda, eso no alcanza. El cuerpo también informa. La deformación, la presión, la tensión y el contacto se vuelven parte del circuito de aprendizaje.
La IA no está mirando al robot desde afuera. Está tratando de acompañar un cuerpo que cambia mientras actúa.
Ese es el salto: la inteligencia no aparece sólo en el software, sino en la relación entre software, cuerpo y entorno.
Qué lograron
Según MIT News, el sistema fue probado en dos brazos robóticos blandos distintos.
Los resultados no son una demo vaga. Hay números:
- redujo errores de trayectoria entre 44% y 55%;
- logró más de 92% de precisión de forma;
- mantuvo estabilidad incluso cuando hasta la mitad de los actuadores fallaban;
- permitió adaptación en tiempo real ante cambios de carga, perturbaciones y condiciones nuevas.
La parte importante no es que el robot “piense como humano”. Esa frase sería demasiado grande.
Lo importante es más concreto: un robot blando pudo ajustar su control sin depender de una recalibración completa cada vez que el mundo cambiaba.
Por qué esto es distinto de un robot industrial
Un brazo robótico clásico funciona muy bien cuando el ambiente está ordenado.
En una fábrica, donde cada pieza llega en posición conocida y cada movimiento se repite miles de veces, la rigidez es una ventaja. La precisión manda.
Pero el mundo real no siempre se deja ordenar así.
Una casa, un hospital, un campo, una zona de desastre o un cuerpo humano no son líneas de montaje perfectas. Hay objetos deformables, superficies raras, peso variable, humedad, golpes, obstáculos y errores.
Los robots blandos nacen para ese mundo menos limpio.
Por eso necesitan otra inteligencia: una que tolere incertidumbre física.
IA encarnada
La palabra técnica que sobrevuela todo esto es embodiment, o inteligencia encarnada.
Significa que la inteligencia no se entiende separada del cuerpo que actúa. Un sistema no sólo “sabe” por representar el mundo internamente; también sabe por cómo su cuerpo puede moverse, sentir, fallar y corregirse.
Un brazo blando no aprende igual que un chatbot.
Un chatbot predice lenguaje. Un robot tiene que predecir consecuencias físicas. Si se equivoca, no aparece una frase mala: aparece un movimiento torcido, un objeto caído, una presión excesiva o una tarea incompleta.
Por eso el cuerpo importa.
La aplicación real
Si esta línea madura, puede servir para varias áreas:
- robots médicos que se adapten a tejidos y movimientos delicados;
- prótesis o exoesqueletos más sensibles al usuario;
- manos robóticas que manipulen objetos frágiles sin romperlos;
- robots de rescate capaces de pasar por espacios irregulares;
- máquinas agrícolas que trabajen con plantas, frutos y suelos variables;
- robots domésticos menos torpes frente al desorden cotidiano.
No es una tecnología para reemplazar de inmediato a los robots industriales. Es una tecnología para lugares donde el mundo no se comporta como una fábrica.
El límite
Conviene no exagerar.
Estos robots no tienen conciencia. No sienten. No entienden su cuerpo como lo entiende una persona.
Lo que tienen es una arquitectura de control inspirada en un principio biológico: conservar una base aprendida y dejar una zona flexible para adaptarse.
Eso ya es bastante.
Porque una parte de la robótica se está dando cuenta de algo que la biología sabe desde hace mucho: no alcanza con tener un cerebro poderoso si el cuerpo no puede responder al mundo.
El cambio de fondo
La IA de los últimos años se volvió famosa por hablar.
Pero el próximo salto no necesariamente va a sonar como una conversación. Puede verse como un brazo flexible que corrige su movimiento mientras toca un objeto. Como una prótesis que entiende mejor la intención del usuario. Como un robot que no se rompe conceptualmente cuando el entorno deja de ser perfecto.
La inteligencia artificial, en ese escenario, deja de ser sólo una herramienta de pantalla.
Empieza a volverse una forma de adaptación física.
No sólo responde.
Se dobla, prueba, corrige y vuelve a intentar.
La versión corta
MIT presentó un sistema para robots blandos inspirado en sinapsis cerebrales.
La idea combina aprendizaje estable y adaptación en tiempo real: una parte del sistema aprende la base del movimiento y otra parte se ajusta cuando aparecen cambios, peso, viento o fallas.
Eso apunta a una IA distinta de la que imaginamos en la nube. Una IA que no sólo procesa datos, sino que aprende a controlar cuerpos flexibles en un mundo imperfecto.
El futuro de la robótica no va a ser sólo más metal.
También va a ser más goma, más sensores y más inteligencia repartida entre cerebro artificial y cuerpo.